
MouseAir Redesign Update
We are working away on designing and building Version 2 of MouseAir. There were a lot of projects ahead of this but it’s back on top. Following is the latest block diagram. We replaced the relays with an excellent motor control chip, the L293D. We’ve submitted a new PCB design and will have the board next week.

Goals
The goals for the redesign are:
- Reduced Cost – eliminate unnecessary parts and reduce cost of current parts
- Double Power Supply – original design had two 5V supplies and one 12V supply. Now just two 5V supplies
- Improved Reliability – Mouse loading was only about 50% effective. Cat detection was about 30% from the RFID and too short range for effective detection (requiring strategically placed treats to trigger – We will be publishing that video!).
Main Redesign
There are four main things we are working on:
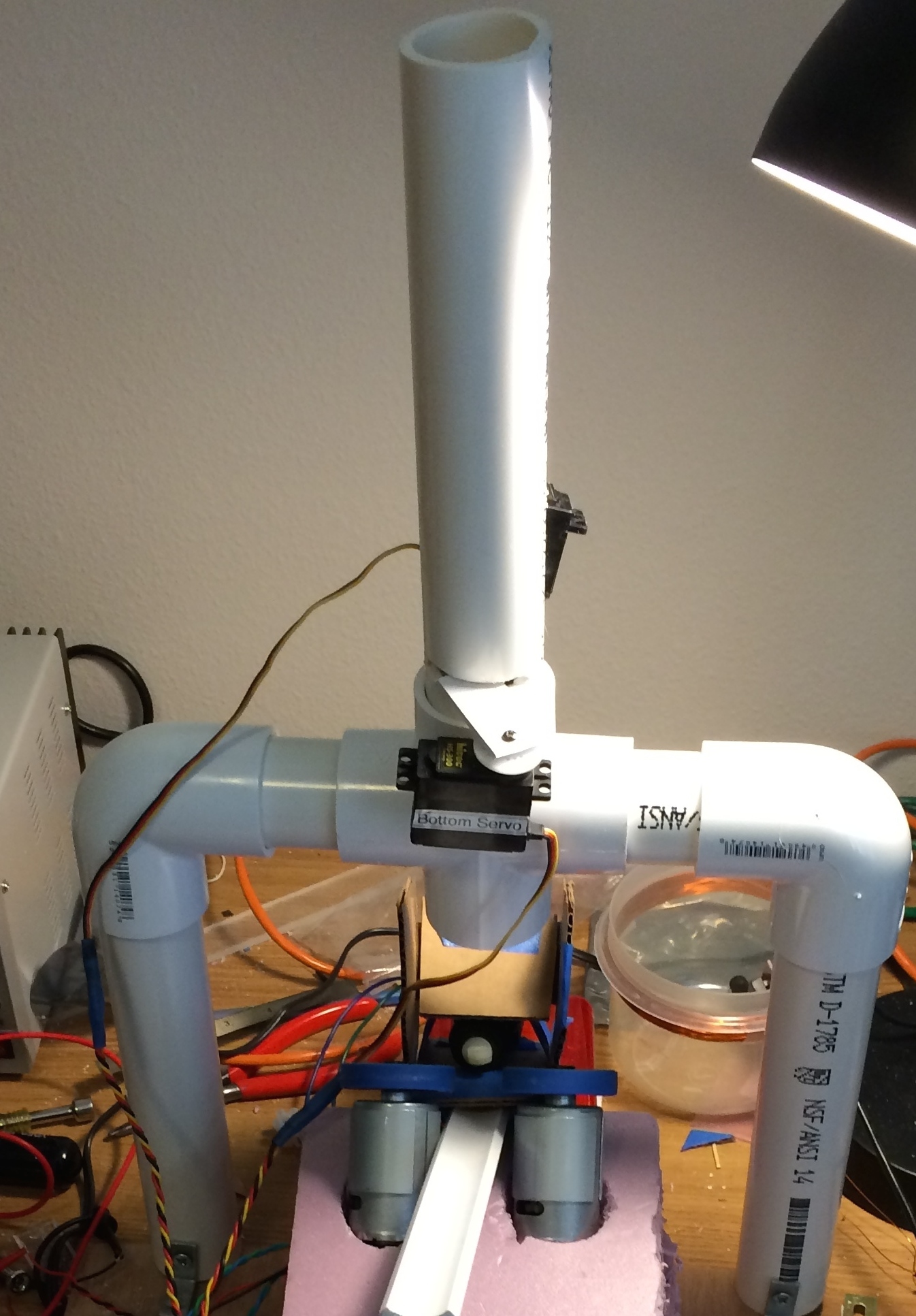
- New Mouse Loading Mechanism – The current drop mechanism is unreliable, large and requires two servo motors. We want a more visual reliable mechanism. Current thoughts are a 45 degree channel with a one servo motor loading mechanism. Below is a picture of the version 1 mechanism. Check out the rack and pinion loading mechanism of version 2.

MouseAir Fully Loaded with Mice 
MouseAir Mouse Loading Tube - New Case – We are 3D printing a case for MouseAir. We are really tired of cutting foam and wood for cases. Pictures next week.

- Removal of the RFID

MouseAir Locked and Loaded sensors – Even with a custom antenna, the range is too short. Another problem is that the chip implanted in the cat (cat seen below) requires a 125KHz RFID system but is one of three possibly standards in the US, which ca not be read by our 125KHz RFID system.
- MouseAir PC Board – We want to simplify the wiring between units. We also want the L239D on the same board as the the other interfaces.

See issue 5 of Raspberry Pi Geek Magazine for the full article on MouseAir Version 1.0.
Finally, below is a picture of the Cat (Panther) and one of his biggest fans.
